Prof. Sankai, University of Tsukuba/CYBERDYNE, Inc.
HAL®(Hybrid Assistive Limb®)は、 身体機能を改善・補助・拡張・再生することができる、世界初のサイボーグ型ロボットです。
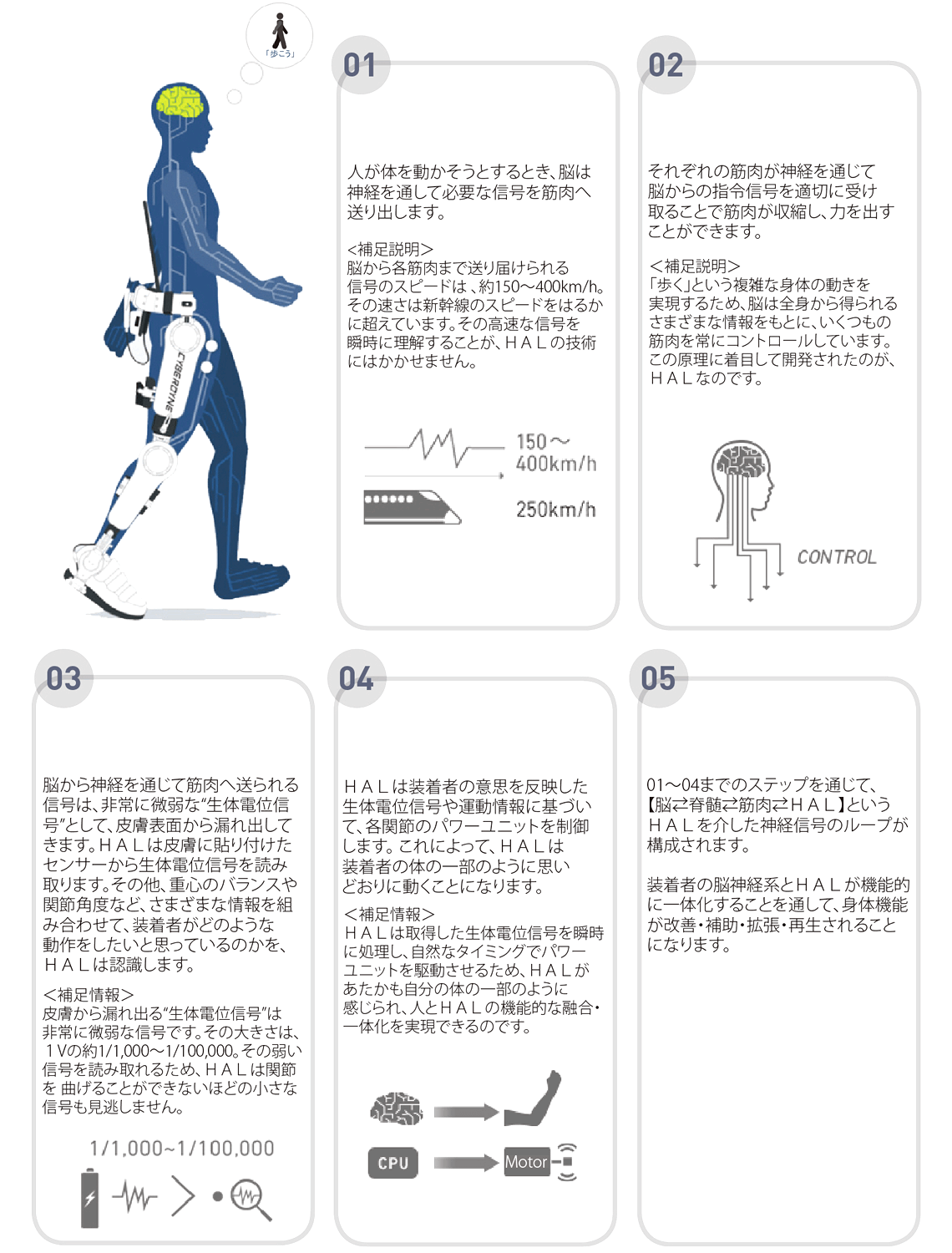
人が体を動かそうとすると、その運動意思に従って脳から神経を通じて筋肉に信号が伝わり、その際、微弱な「生体電位信号」が体表に漏れ出してきます。HAL®は、装着者の「生体電位信号」を皮膚に貼ったセンサーで検出し、意思に従った動作を実現します。
 Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
 Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
 Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
小型で軽量でありながら、着けている方の関節の運動を力強くサポートします。ベッドで横になったままで、また座位状態でも動かしたい、
肘関節や膝関節、足関節だけを集中的にトレーニングできます。
HAL®腰タイプ介護支援用は、移乗介助のような介助動作において腰部にかかる負荷を低減することで、腰痛を引き起こすリスクを減らします。これまで通りの介護を楽に行うことができ、支えられる側だけでなく、支える側も支援します。
人が体を動かすときに脳から筋肉へ送られる信号、“生体電位信号”を読みとってHAL®はその信号の通りに動きます。
ベッドから車いすへの移乗介助・体位変換介助、排泄介助などの長時間の中腰維持などの負荷をより低減できる機能を実現しました。
バッテリ駆動であるため、様々な場所で使用できます。コンパクトな軽量モデルであるため、装着したまま長時間ご利用いただけます。
 Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
 Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
HAL®腰タイプ自立支援用は、足腰の弱った方などの体幹・下肢の運動をアシストする装着型ロボットです。
装着して体幹動作や立ち座り動作を繰り返すことによって身体そのものの機能向上を促すため、HAL®を外した状態での自立度を高めることが期待できます。
HAL®を装着して意思に従った運動を繰り返すことにより、身体機能の維持・向上につなげます。
介助なしでの立ち座り動作など、介護される人の自立度の向上は、介護する人の身体的負担も大きく軽減します。
HAL®自立支援用下肢タイプProは、下肢に障がいがある維持期・生活期の方や脚力が弱くなった方の下肢の運動をアシストすることで、機能の維持・向上を促進する装着型のロボットです。
HAL®福祉用(下肢タイプ)の後継モデルとして、より高性能になって登場しました。
事故や病気などの影響で下肢が動かしづらくなってしまった方でも、HAL®を使って生体電位信号に基づいた運動を繰り返し行うことで、脳神経・筋系の繋がりが促進され、身体機能の維持・向上や自立度を高めることが期待されます。
 Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.
Prof. Sankai, University of Tsukuba / CYBERDYNE Inc.